1)
Sur la fiche élève : Trouver les deux contraintes liées au déplacement
du robot livreur, en vous aidant des images et de la vidéo de
présentation ci-dessous.
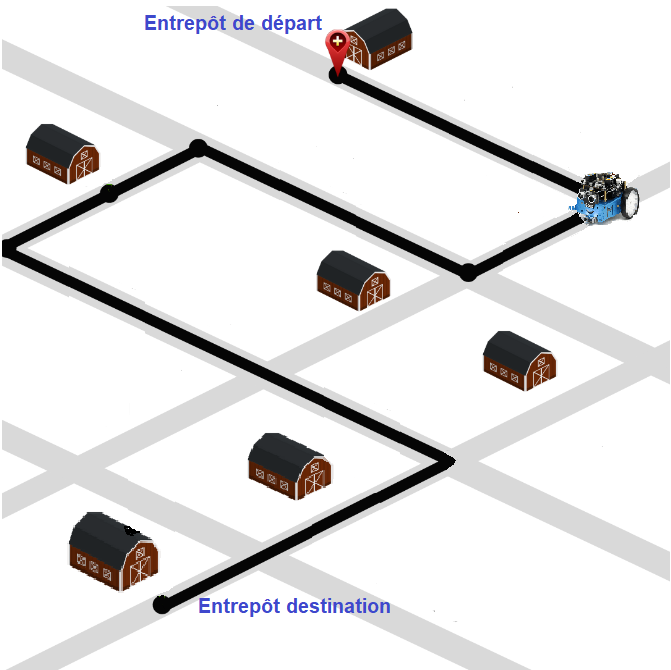
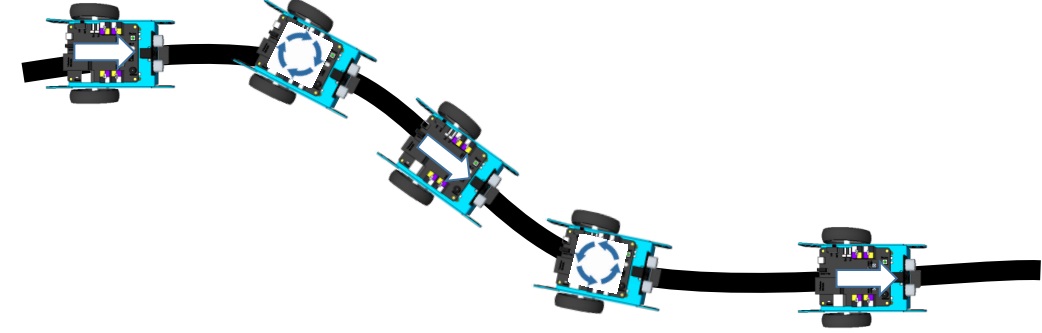
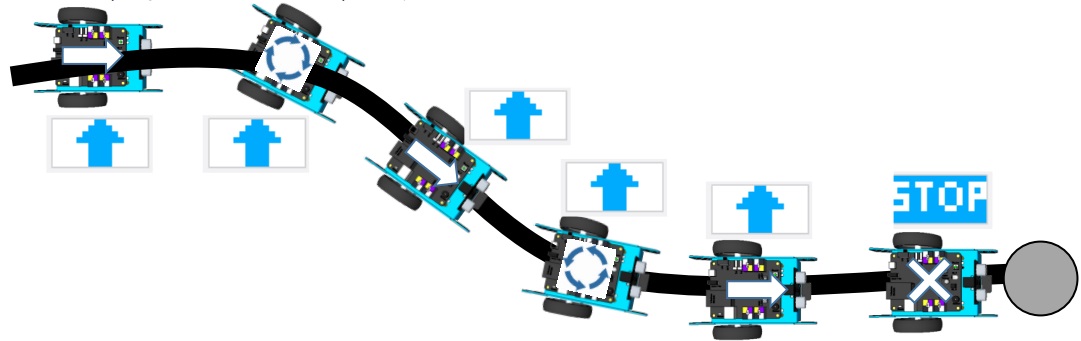
a) Première contrainteà découvrir sur la fiche élève grâce à ces deux images :
Parcours prédéfini d'un robot livreur dans un parc d'entrepôts
Robot suiveur de ligne dans un entrepôt
b) Deuxième contrainte : Etudier de nouveau la video (penser aux sous-titres) sur le R2D2 du Lot pour identifier la deuxième contrainte et compléter la fiche élève.
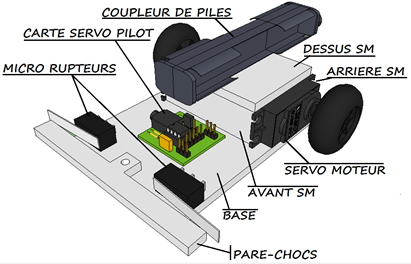
2) Le robot livreur choisi est le Mbot . Etudier les composants du Mbot
en complétant la fiche élève à l'aide du document ci-dessous :
Aides : mBot et ses composants
Correction 1er partie
Aide : Capteurs Actionneurs
Correction 2er partie
Ensuite, compléter la fiche élève en trouvant les composants et fonctions rattachés aux deux contraintes identifiées lors de l'étude du robot livreur.
Bilan
séance n°1 à recopier :
Fiche
élève séance n°2:
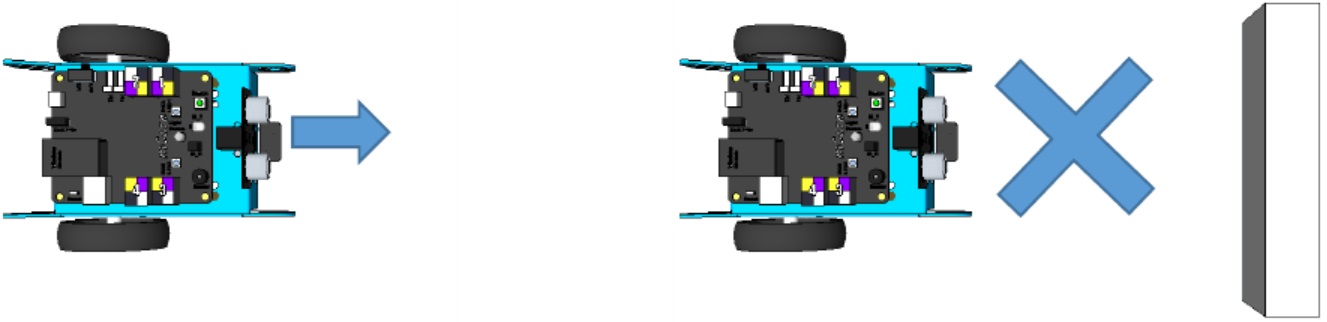
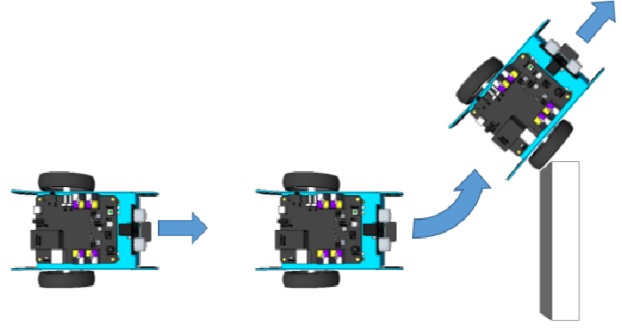
Précision : Le robot doit parcourir seul un
parcours tracé et éviter les obstacles. L'alimentation doit pouvoir être coupée
et rétablie facilement.
a) Familiarisation avec le logiciel de programmation : mBlock est une version améliorée de Scratch. Il peut
être installé ou utilisé en ligne. mBlock5 possède de nouveaux blocs
liés à des actions matérielles, permettant de contrôler le robot mBot. Utilisation mBlock5 en ligne
Respecter les instructions :
Utiliser Google Chrome
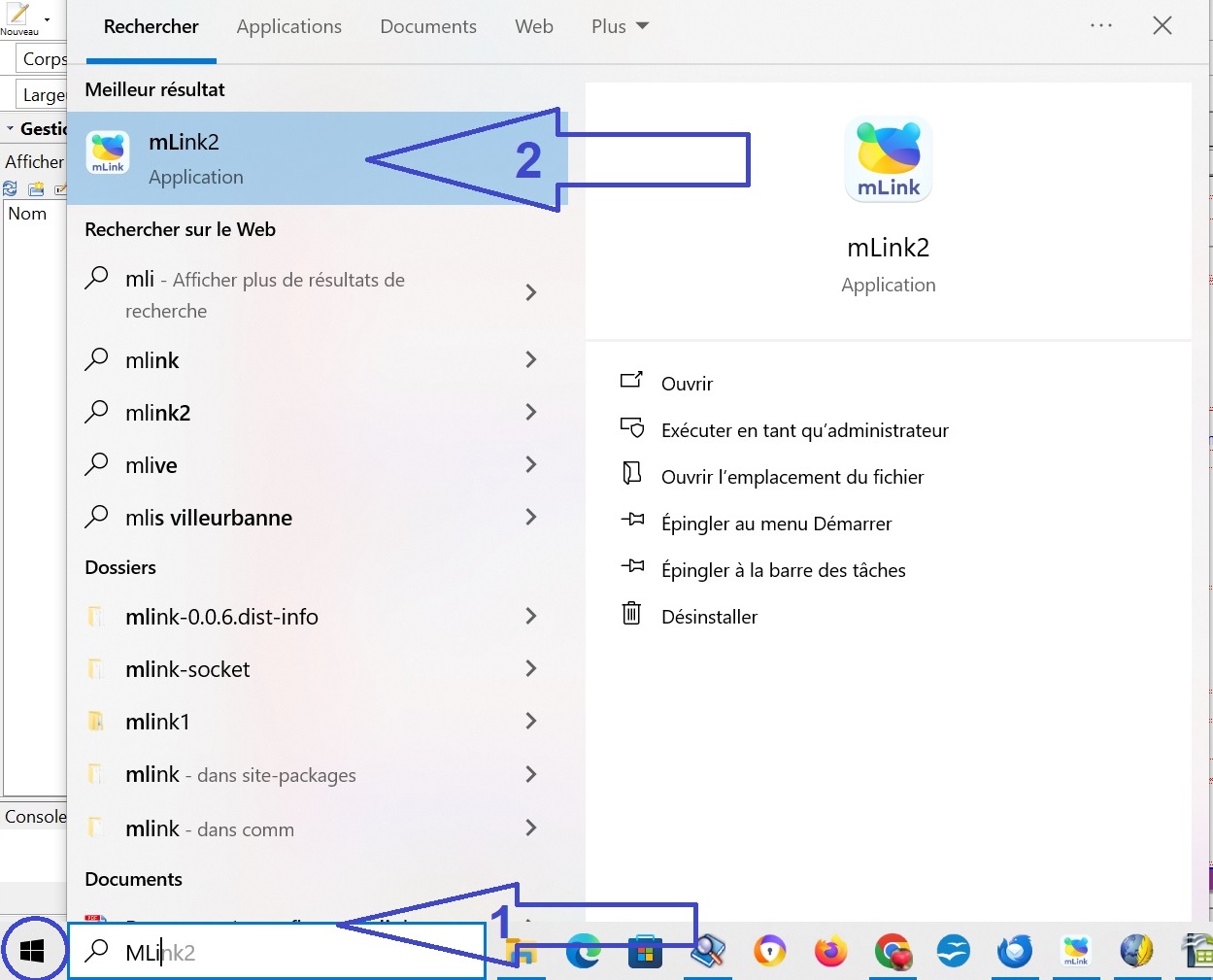
Sur votre ordinateur, ouvrir mLink2 :
1- dans la barre de recherche Windonws Taper mLink2
2 - Cliquer sur l'icon de mLink2-
A partir de mLink2 : Lancer mBlock ... editor
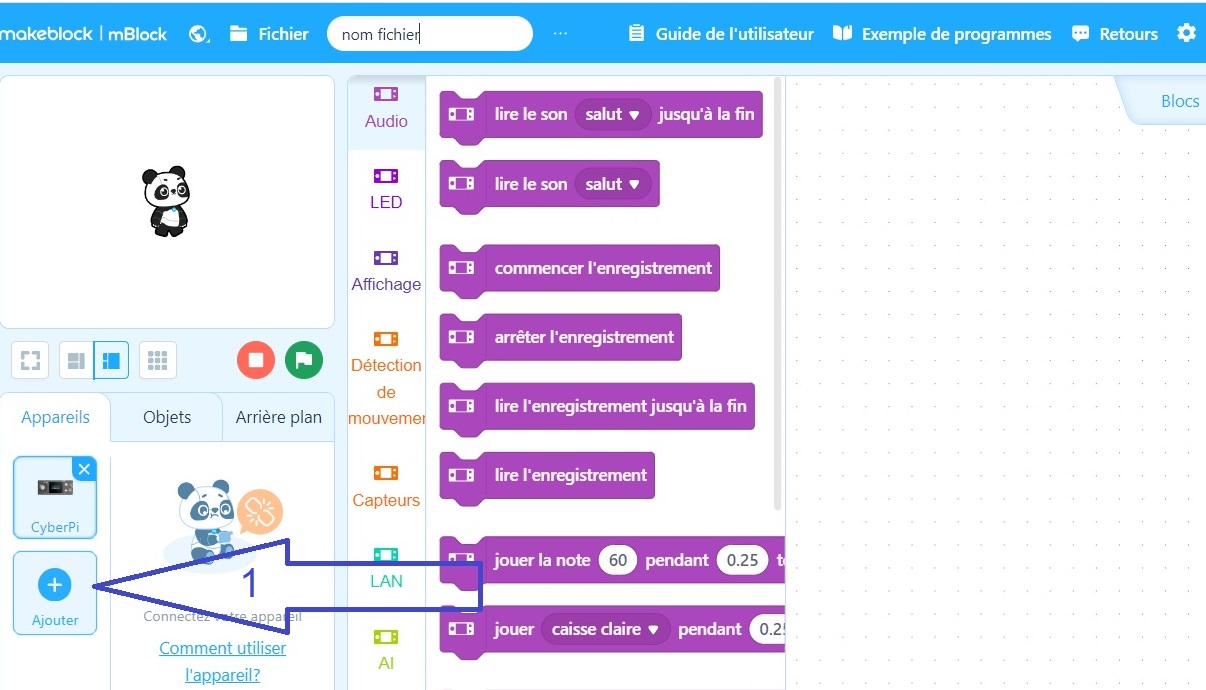
Losque mBlock5 est actif dans un onglet de Chome :
1 - Ajouter le Matériel->
2 - Rechercher et ajouter le Mbot
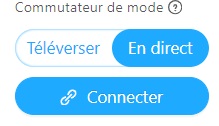
Attention à faire la différence entre le mode connecté et le mode automate !
modeconnecté permet
de piloter le mBot en direct avec un ordinateur via une connexion USB
ou sans fils...mais une fois déconnecté, le mBot restera inerte.
modeautomate permet
lui de programmer le mBot. C'est à dire d'implémenter le programme dans
le mBot. Dans ce cas, après avoir téléversé le programme, le mBot
exécutera son programme une fois alimenté.
Travail à faire et à présenter au professeur :
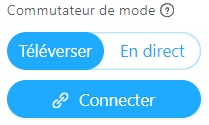
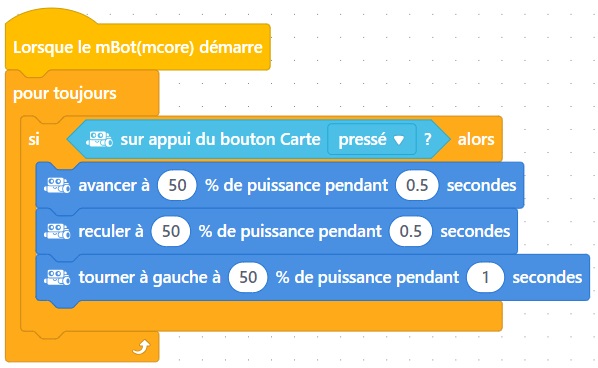
En modeautomate:
Afin de ce familiariser avec le MBot, écrire le
programme test ci-contre et le téléverser dans le
Mbot :
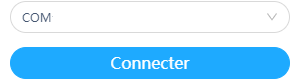
1 - Connecter le MBot via le port USB , l'interrupteur doit être en position ON.
2 - Cliquer sur
3 - Choisir le port de communication
4 - le programme. Attention le téléversement peut prendre du temps (barre de progression)
5 - Débrancher le calbe USB du mBot. Vérifier que le programme s'execute correctement.
Présenter le résultat à votre professeur !
Les
étapes suivantes sont à réaliser à partir de la fiche élève pour
fournir au robot livreur les fonctions liées aux contraintes (voir
séance n°1).
Présenter à chaque étape le résultat à votre professeur.